Французские ученые предложили механизм, с помощью которого можно заставить плыть маленькую (радиусом порядка микрометра) упругую сферу, а также проверили его на больших масштабах, сохраняя число Рейнольдса. Статья опубликована в Physical Review Letters, кратко об исследовании сообщает Physics.
Сложно представить себе робота размером в несколько микрометров с гребным винтом или реактивным двигателем, поэтому такие роботы должны передвигаться, периодически изменяя свою форму и отталкиваясь от окружающей среды. Требование периодичности несколько осложняет эту задачу. Если робот изменит свою форму, он, конечно, переместится вперед, однако ему нужно вернуться в исходное состояние, чтобы повторить цикл, и если он будет делать это тем же способом, он никуда в конечном счете не сдвинется. На больших масштабах проблему можно обойти, если изменять форму в ходе прямого и обратного процесса с разной скоростью. Однако на более мелких масштабах, на которых вязкость жидкости играет существенную роль, такая стратегия не работает, и изменение формы должно значительно отличаться во время прямого и обратного хода. Это утверждение известно как теорема гребешка (scallop theorem), подробно она исследуется в работе Эдварда Парселла «Жизнь при низких числах Рейнольдса».
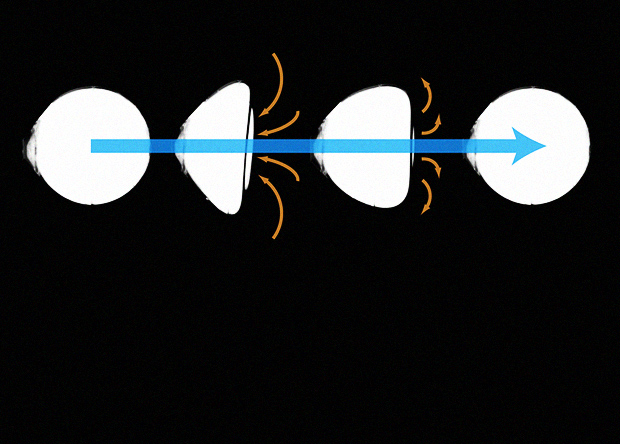
В этой работе ученым удалось обойти эту проблему, построив слегка несимметричного робота. Предложенная ими конструкция выглядит как полый шарик, сделанный из эластичного материала и имеющий некоторую «слабую точку», в которой его поверхность легче деформируется. Внутрь шарика исследователи закачали воздух. При сдувании робота он поплывет в сторону слабой точки, а при надувании сферы до начального состояния он сдвинется обратно, однако эти два смещения оказываются не равны из-за гистерезиса — грубо говоря, сфера по-разному деформируется в ходе сдувания и надувания. В итоге за один цикл робот сдвигается, хоть и не очень сильно (примерно на один процент от своего радиуса).
Предложенную стратегию физики проверили экспериментально. Для этого они взяли сферу с радиусом около 25 миллиметров и тонкими стенками, сделанными из упругого материала с модулем Юнга около 0,5 мегапаскаль. Давление внутри шарика менялось с помощью подключенной к ней трубки, сам шарик был прикреплен к рельсу, так что мог без трения двигаться в направлении «слабой точки». Данную конструкцию ученые помещали в воду (число Рейнольдса Re ≈ 6×104) и масло Юкон (вязкость которого в тысячу раз выше, так что на этот раз Re ≈ 0.7). Движение в масле эквивалентно движению в воде для сферы с радиусом, уменьшенным во столько раз, чтобы число Рейнольдса оставалось тем же. Другими словами, эксперимент с маслом моделирует движение в воде микроробота с радиусом около 2,5 микрометров.
Оказалось, что данная стратегия работает в обеих жидкостях, причем в масле робот плыл даже быстрее, чем в воде. При частоте изменения давления около 150 герц скорость движения шарика составила около трех метров в секунду (для воды). В то же время, при разных вязкостях движение объясняется разными эффектами. Так, в воде шарик двигался за счет того, что по-разному всасывал и выбрасывал воду во время прямого и обратного хода. В масле же большую роль играют силы трения, возникающие при деформации оболочки.
Этим летом китайские исследователи научились управлять нанороботами с помощью внешнего магнитного поля, а еще раньше ученые заставили нанороботов двигаться с помощью ферментов или ультразвука. Впрочем, во всех этих случаях робота приводила в движение внешняя сила. В данной же статье физики предложили механизм, с помощью которого робот может перемещаться самостоятельно — если он сможет надуваться и сдуваться с помощью какого-нибудь внутреннего механизма.
По информации https://nplus1.ru/news/2017/11/29/microswimmer
Обозрение "Terra & Comp".
�









{kind=link}