Немецкие инженеры создали миниатюрного робота, управляемого магнитным полем. За счет внешнего поля он может плавать, ходить по твердым поверхностям, а также захватывать и перемещать предметы. Текущая модификация имеет длину около трех миллиметров, но в будущем исследователи планируют значительно уменьшить его и создать робота для медицинских целей, сообщается в работе, опубликованной в журнале Nature.
Обычные электромоторы сложно масштабировать для миниатюрных роботов, поэтому инженеры занимаются разработкой других способов приводить их в движение. Самый удобный и распространенный среди таких разработок метод — управление с помощью внешнего магнитного поля. Таким роботам не нужно нести на себе мотор и аккумулятор, а работать они могут и при отсутствии контакта или прямой видимости с излучателем, за счет чего их можно использовать для манипуляций внутри организма. Но у роботов с магнитным управлением есть и недостатки: они поддерживают лишь ограниченный набор движений и сред, в которых они могут перемещаться.
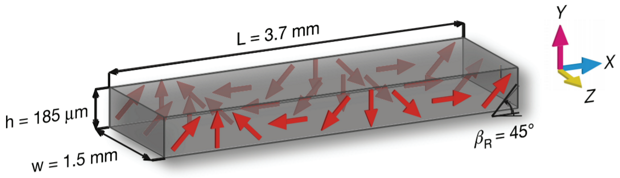
Исследователи под руководством Метина Ситти (Metin Sitti) из Института интеллектуальных систем имени Макса Планка разработали гораздо более универсального магнитного робота. Он представляет собой прямоугольную полоску из силиконового эластомера с магнитными частицами из неодима, железа и бора со средним размером около пяти микрометров. Эти частицы намагничиваются таким образом, что их векторы намагниченности в полоске имеют гармонический профиль.
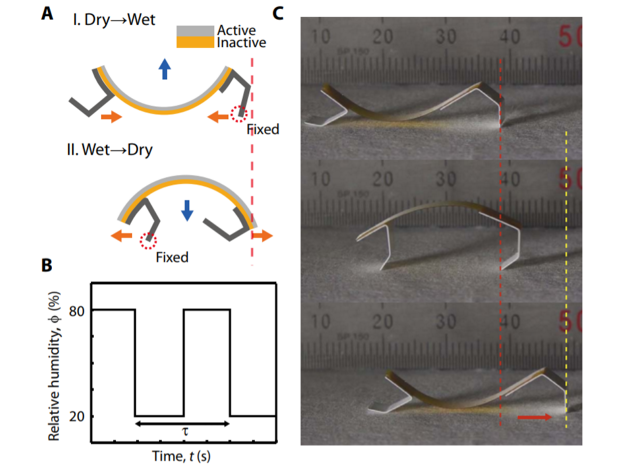
Поскольку намагниченность в полоске распределена неравномерно, во внешнем магнитном поле она начинает изгибаться, причем величина и направление изгиба зависит от величины и направления вектора магнитной индукции. Таким образом инженеры "научили" робота совершать сложные движения: ходить по твердой поверхности, плавать, нырять в воду, подниматься по мениску жидкости и ползать по узким трубкам.
Помимо этого, разработчики научили робота захватывать и перемещать небольшие объекты, а также прыгать, резко изменяя свою форму и отталкиваясь от поверхности.
Инженеры отмечают, что пока робот будет применяться для исследовательских целей, к примеру, изучения движения на границах неньютоновских жидкостей или сыпучих сред. В будущем они планируют значительно уменьшить размеры робота и испытать его внутри живых организмов.
В прошлом году американские исследователи создали полимерные кубы, которые могут под действием магнитного поля объединяться в микроскопического робота. Он может перемещаться в жидкости или захватывать объекты, в том числе и живые клетки. А другие исследователи создали микророботов, которые также могут перемещаться и захватывать объекты, но делают это при изменении температуры, а не за счет переменного магнитного поля.
По информации https://nplus1.ru/news/2018/01/24/magnetic-robot
Обозрение "Terra & Comp".
�










{kind=link}