Оказалось, что с помощью ДНК-линкеров нескольких типов можно заставить микротрубочки формироваться в группы, разъединяться обратно или вызывать их совместное поступательное и вращательное движение, сообщают ученые в Nature Communications.
Рой роботов обычно представляет из себя набор одинаковых относительно простых в конструкции механизмов, коллективное поведение которых определяется роевым интеллектом и основано только на взаимодействии между собой и с окружающей средой без центра управления, раздающего команды каждому в отдельности. Обычно перед роем роботов ставят задачу принять ту или иную форму или совершать заданные движения.
Подобные же задачи встают и при переходе на молекулярный уровень. Известно, что роевое поведение может быть характерно для некоторых биологических систем, в частности биомолекулярных моторов или элементов цитоскелета. Самые маленькие на сегодняшний день молекулярные роботы, способные к коллективной работе, это микротрубочки — собранные из тубулина полые цилиндры диаметром примерно 25 нанометров и длиной от 2 до 20 микрометров. Их коллективное поведение основано на работе соединительных элементов, которые обеспечивают взаимную организацию на достаточно больших расстояниях, во много раз превосходящих размер отдельных элементов.
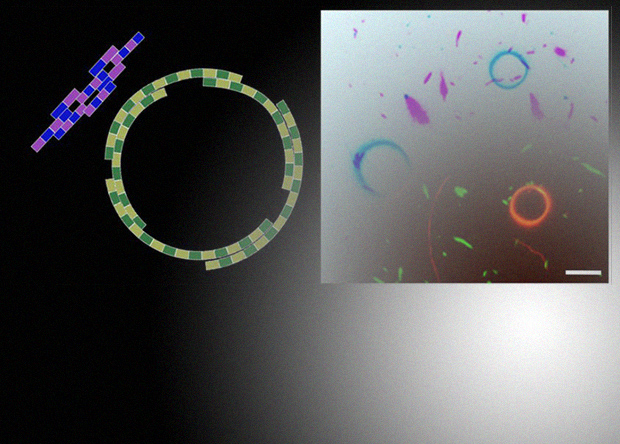
Группа японских и американских химиков под руководством Акиры Какуго (Akira Kakugo) из Университета Хоккайдо нашла способ управления движением отдельных элементов и их коллективным поведением в аналогичной искусственной системе, состоящей из большого количества молекулярных моторчиков, роль которых выполняли как раз микротрубочки. Чтобы можно было контролировать их поведение, ученые пришили к ним небольшие участки ДНК. Для визуализации к ДНК также пришивались несколько различных флуоресцентных красителей, по которым разные микротрубочки можно было отличать друг от друга.
Модифицированные микротрубочки были помещены на стеклянную подложку, покрытую небольшими молекулами кинезина, которые заставляют молекулярные моторы перемещаться, двигаясь вдоль них за счет энергии АТФ. Для объединения в группы авторы работы использовали два типа микротрубочек: длинные и гибкие (длиной от 15 до 20 микрометров) или короткие и жесткие (длиной около 5 микрометров). Формирование таких роев происходило с помощью соединительных элементов, тоже представляющих собой небольшие участки одноцепочечных молекул ДНК. Добавляя один тип ДНК (комплементарный тем участкам, которые пришиты к микротрубочкам), можно соединять микротрубочки между собой, а с помощью ДНК другого типа (связывающей линкеры первого типа) — наоборот, разъединять их. Оба процесса занимают от нескольких десятков минут до часа.
В присутствии молекул АТФ отдельные микротрубочки просто совершают беспорядочные движения независимо друг от друга, но если объединить их в группу, совместные движения приобретают более упорядоченный характер. Так, если собирать в рой короткие микротрубочки, то они образуют линейные структуры, которые совершают совместное поступательное движение. Длинные же микротрубочки, в свою очередь, образуют циклические структуры, которые начинают вращаться. При этом скорость движения после объединения в рой близка к скорости отдельных микротрубочек (примерно 0,6 микрометров в секунду для отдельных микротрубочек и 0,5 микрон в секунду — для роя).
Кроме того, с использованием фоточувствительных азобензольных групп на молекулах ДНК можно переключать систему с коллективного роевого поведения на одиночное поведение с помощью света, и тогда каждый молекулярный мотор начинает действовать независимо от других.
По словам авторов работы, результаты работы будут полезны как для фундаментального понимания принципов работы и возможного управления коллективной работой систем молекулярных моторов, так и для развития ДНК-нанотехнологий и создания систем кодирования информации на молекулярном уровне.
Использовать облучение светом для управления роевым поведением роботов можно не только на молекулярном уровне, но и для небольших традиционных роботов, управляемых вибромоторами. Так, рой роботов Kilobots с помощью единственного источника света можно заставить разбегаться в разные стороны, образуя на плоскости фигуры заданной формы.
По информации https://nplus1.ru/news/2018/02/01/swarm-biomolecular-robots
Обозрение "Terra & Comp".
�














{kind=link}