Многие технологии, которые необходимы для повседневной жизни - от связи до GPS-навигации и прогнозирования погоды - опираются на тысячи спутников, вращающихся вокруг Земли. Когда у этих спутников закончится газ и они перестанут работать, в настоящее время мало что можно сделать, чтобы их починить.
«Когда у спутника заканчивается топливо, и у вас нет способа его заправить, этот спутник перестает работать», - сказал Джон Вен, профессор и руководитель кафедры электротехники, вычислительной техники и системотехники в Политехническом институте Ренсселера. «Когда это произойдет, будет запущен новый спутник, чтобы заменить существующий».
Это дорогостоящая, отнимающая много времени и все более проблематичная реальность, поскольку сломанные спутники становятся частью растущего космического мусора. Команда исследователей из Rensselaer во главе с Джоном Веном вместе с НАСА работают над решением: роботом, который сможет схватить спутник в космосе и втянуть его в док, где он будет заправлен.
«Наша часть исследований заключается в том, чтобы уделить особое внимание транспортировке массивного спутника, который намного превышает возможности этого робота манипулятора на Земле из-за действия силы тяжести», - сказал Вен.
Роботизированная рука строится для НАСА компанией Maxar Technologies длиной около 2 метров и тонкой, чтобы она смогла работать как можно более эффективно в космосе. Для этого у нее есть механизмы и суставы, которые позволят ей обращаться с большим спутником. Но эти компоненты также обеспечивают гибкость, сказал Вен.
Исследователи из Rensselaer работают с НАСА над разработкой сложных алгоритмов, которые будут контролировать движение руки, позволяя ей точно транспортировать и закреплять спутник на причальной станции для дозаправки.
Вен сравнивает проблему с трудностью перемещения массивного автобуса по льду на хоккейном катке. Подобно скользкому льду, отсутствие гравитации смягчает проблему перемещения тяжелого объекта, но не обязательно делает задачу тщательного управления его движениями намного легче.
«В космосе не будет человека, который мог бы вмешаться», - сказал Вен. «Все зависит от наземного оператора. Поэтому мы должны провести обширное моделирование как в программном, так и в аппаратном обеспечении, чтобы убедиться, что эта операция безопасна».
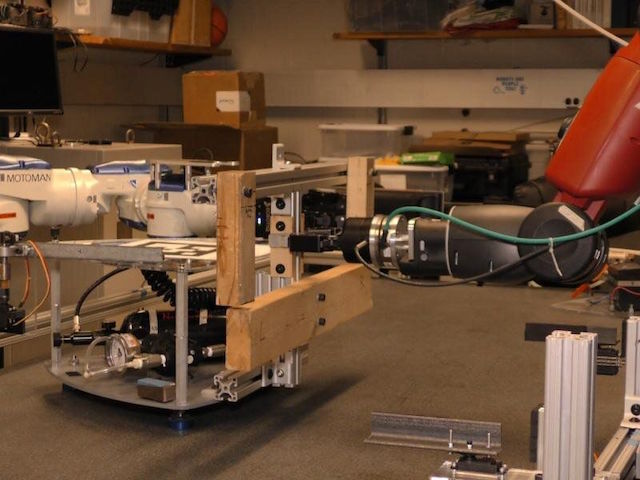
Это моделирование выполняется как в вычислительном, так и в физическом плане в Центре технологий и систем автоматизации в Rensselaer. Для физического моделирования команда использует установку с воздушными подшипниками (по существу, стол для аэрохоккея), где небольшая спутниковая модель может плавать вдоль поверхности, имитируя среду невесомости. Меньшая рука робота моделирует движение, которое она будет совершать в космосе.
«Действительно здорово работать с НАСА над проектом, в котором есть шанс, что то, что мы разрабатываем, действительно будет использовано», - говорит Кимберли Оукс, докторант в области электротехники. «Это возможность, которую вы не получаете в области исследований».
Команда Вена работает с Отделом проектов обслуживания спутников в Центре космических полетов имени Годдарда НАСА в Гринбелте, штат Мэриленд, и разрабатывает набор технологий, необходимых для заправки спутника на орбите. Кроме того, Вен видит другие приложения для этой работы.
«Все труднее доставлять на орбиту тяжелые полезные грузы, поэтому, когда мы говорим о лунной миссии , миссии на Марс и так далее, все чаще и чаще придется собирать все в космосе», - сказал Вен. «Роботизированная технология, над которой мы сейчас работаем, станет основой такой работы в будущем».
По информации https://www.astronews.ru/cgi-bin/mng.cgi?page=news&news=20191211215209
Обозрение "Terra & Comp".
�












{kind=link}